SISTEMAS TECNOLOGICOS

|
TIPOS DE SISTEMAS TECNOLOGICOS
Los sistemas
mecánicos son aquellos sistemas constituidos fundamentalmente por componentes,
dispositivos o elementos que tienen como función específica transformar o
transmitir el movimiento desde las fuentes que lo generan, al transformar distintos
tipos de energía.
CARACTERISTICAS DE LOS SISTEMAS MECANICOS
Se caracterizan por presentar elementos o piezas solidos,
con el objeto de realizar movimientos por acción o efecto de una fuerza.
En ocasiones, pueden asociarse con sistemas eléctricos y
producir movimiento a partir de un motor accionado por la energía eléctrica.
En general la mayor cantidad de sistemas mecánicos usados
actualmente son propulsados por motores de combustión interna.
en los sistemas mecánicos. se utilizan distintos elementos
relacionados para transmitir un movimiento.
Como el movimiento tiene una intensidad y una dirección, en
ocasiones es necesario cambiar esa dirección y/o aumentar la intensidad, y para
ello se utilizan mecanismos.
en general el sentido de movimiento puede ser circular
(movimiento de rotación) o lineal (movimiento de translación) los motores
tienen un eje que genera un movimiento circular.
tipos de sistemas mecanicos
1.Engranajes:
 |
movimiento circular entre ejes
cercanos mediante el empuje que ejercen
los dientes de unas piezas sobre otras.
El engranaje en el que se inicia el movimiento se llama engranaje
de entrada o motriz y el que termina la transmisión engranaje de
salida o conducido. El sentido de
giro de
los engranajes es contrario
2.Rodillo.

En la actualidad también se le da el nombre de rodillo a
ruedas cuya longitud es muy grande respecto a su diámetro y que manteniéndose
fijas en el espacio (gracias a que también disponen de un eje de giro) permiten
el desplazamiento de objetos sobre ellas.
3.Tren de rodadura


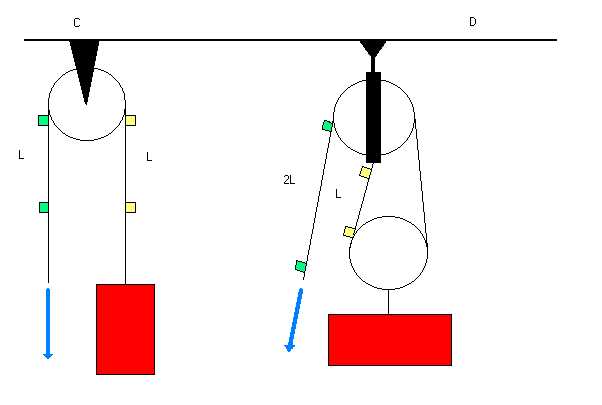
El polipasto es una maquina simple que se usa para levantar cargas muy pesadas a una cierta altura. Está formado por un bloque de poleas fijo al techo, y otro bloque de poleas móvil, acoplado al primer bloque mediante una cuerda. Se usa de forma similar a la polea simple, pero en el caso del polipasto la fuerza que hay que aplicar es menor, de manera que se consigue una ventaja mecanica
La fuerza necesaria para subir una carga se obtiene dividiendo el peso por el número total de poleas en el conjunto.
7.Sistema polea correa
El sistema de poleas con correa más simple consiste en dos poleas situadas a cierta distancia, que giran a la vez por efecto del rozamiento de una correa con ambas poleas. Las correas suelen ser cintas de cuero flexibles y resistentes. Es este un sistema de transmisión circular puesto que ambas poleas poseen movimiento circular.
8.Palancas:

*Palanca de primer grado:

*Palanca de tercer grado:



CARACTERISTICAS DEL SISTEMA ELECTRICO

3.Tren de rodadura
La utilidad del tren de rodadura
aparece cuando queremos arrastrar o empujar objetos reduciendo su rozamiento
con el suelo (u otra superficie sobre la que se mueva). Su utilidad se centra
en mantener la rueda solidaria con el objeto a la vez que reduce la fricción
entre este y el suelo.
4.Polea fija.
En las poleas fijas, las tensiones (fuerzas) a ambos lados
de la cuerda son iguales (T1 = T2) por lo tanto no reduce la fuerza necesaria
para levantar un cuerpo. Sin embargo permite cambiar el ángulo en el que se
aplique esa fuerza y transmitirla hacia el otro lado de la cuerda.
5.Polea movil
La polea movil no es otra cosa
que una polea de gancho conectada a una cuerda que tiene uno de sus extremos
anclado a un punto fijo y el otro (extremo movil) conectado a un mecanismo de
tracción.
Estas poleas disponen de un
sistema armadura-eje que les permite permanecer unidas a la carga y arrastrarla
en su movimiento (al tirar de la cuerda la polea se mueve arrastrando la
carga).
6.Polipasto:
La fuerza necesaria para subir una carga se obtiene dividiendo el peso por el número total de poleas en el conjunto.
7.Sistema polea correa
El sistema de poleas con correa más simple consiste en dos poleas situadas a cierta distancia, que giran a la vez por efecto del rozamiento de una correa con ambas poleas. Las correas suelen ser cintas de cuero flexibles y resistentes. Es este un sistema de transmisión circular puesto que ambas poleas poseen movimiento circular.
8.Palancas:
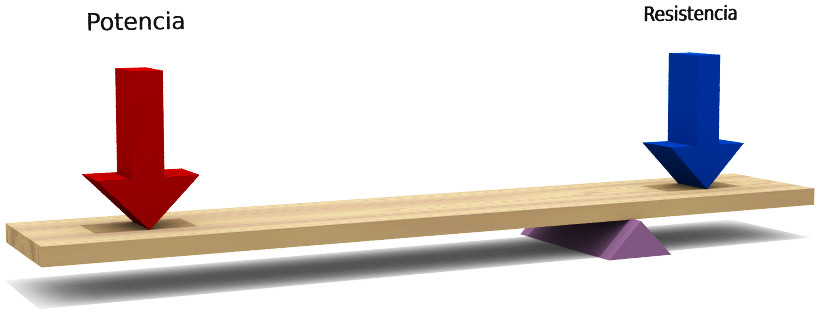
Una palanca es una
barra rígida pudiendo girar alrededor de un punto fijo para levantar las
cargas. Uno utiliza una palanca para vencer una resistencia.
*Palanca de primer grado:
permite situar la carga (R, resistencia) a un lado del
fulcro y el esfuerzo (P, potencia) al otro, lo que puede resultar muy cómodo
para determinadas aplicaciones (alicates, patas de cabra, balancines...). Esto
nos permite conseguir que la potencia y la resistencia tengan movimientos
contrarios cuya amplitud (desplazamiento de la potencia y de la resistencia)
dependerá de las respectivas distancias al fulcro.
*Palanca de segundo grado
permite situar la carga (R, resistencia) entre el fulcro y
el esfuerzo (P, potencia). Con esto se consigue que el brazo de potencia
siempre será mayor que el de resistencia (BP>BR) y, en consecuencia, el
esfuerzo menor que la carga (P<R). Este tipo de palancas siempre tiene
ganancia mecánica.
*Palanca de tercer grado:
permite situar el esfuerzo (P, potencia) entre el fulcro (F)
y la carga (R, resistencia). Con esto se consigue que el brazo de la
resistencia siempre será mayor que el de la potencia (BR>BP) y, en
consecuencia, el esfuerzo mayor que la carga (P>R). Este tipo de palancas
nunca tiene ganancia mecánica.
9.Plano inclinado:

El
plano inclinado es una máquina simple que permite subir objetos realizando
menos fuerza. Para calcular la tensión de la cuerda que equilibra el plano,
descomponemos las fuerzas y hacemos la sumatoria sobre cada eje. Es
recomendable girar el sistema de ejes de tal forma que uno de ellos quede
paralelo al plano. Con esto se simplifican las cuentas ya que la sumatoria de
fuerzas en X tiene el mismo ángulo que la tensión que lo equilibra9.Plano inclinado:
* Rampa:
La rampa viene definida por su
inclinación, que puede expresarse por el ángulo que forma con la horizontal o
en porcentaje (relación entre la altura alcanzada respecto a lo que avanza
horizontalmente, multiplicado por 100). Este último es el que se emplea usualmente
para indicar la inclinación de las carreteras.
*Cuña:

*Tornillo

*Tirafondo:
 |
|
*Cuña:
De forma sencilla se podría describir como un prisma
triangular con un ángulo muy agudo. También podríamos decir que es una pieza
terminada en una arista afilada que actúa como un plano inclinado móvil.
*Tornillo
es un operador que deriva directamente del plano inclinado y
siempre trabaja asociado a un orificio roscado.
*Tirafondo:
es un tornillo afilado dotado de una cabeza diseñada para
imprimirle un giro con la ayuda de un útil (llave fija, destornillador, llave
Allen...).
El diseño de la rosca se hace en función del tipo de material
en el que ha de penetrar. Se fabrican tirafondos con roscas especiales para
chapas metálicas (aluminio, latón, acero...), maderas (naturales, aglomerados,
contrachapados, DM...), plásticos, materiales cerámicos, tacos...
2.Sistemas electricos:
La energía eléctrica es necesaria para el funcionamiento de muchos sistemas e instrumentos del aeroplano: arranque del motor, radios, luces, instrumentos de navegación, y otros dispositivos que necesitan esta energía para su funcionamiento (bomba de combustible, en algunos casos accionamiento de flaps, subida o bajada del tren de aterrizaje, calefacción del pitot, avisador de pérdida, etc...
|
CARACTERISTICAS DEL SISTEMA ELECTRICO
1. Todo circuito eléctrico está formado por una fuente de
energía (tomacorriente), conductores (cables), y un receptor que transforma la
electricidad en luz (lámparas),en movimiento (motores), en calor (estufas).
2. Para que se produzca la transformación, es necesario que
circule corriente por el circuito.
3. Este debe estar compuesto por elementos conductores,
conectados a una fuente de tensión o voltaje y cerrado.
CLASES DE SISTEMAS ELECTRICOS
1.Circuito conectado en serie

3.Sistemas hidraulicos



CLASES DE SISTEMAS ELECTRICOS
1.Circuito conectado en serie
Los circuitos en serie son aquellos circuitos donde la
energía eléctrica solamente dispone de un camino, lo cual hace que no interesen
demasiado lo que se encuentra en el medio y los elementos que la componen no
pueden ser independientes.
2.Circuito conectado en parale.

2.Circuito conectado en parale.
El circuito eléctrico en paralelo es una conexión donde los
puertos de entrada de todos los dispositivos (generadores, resistencias,
condensadores, etc.) conectados coincidan entre sí, lo mismo que sus terminales
de salida.
Siguiendo un símil hidráulico, dos tinacos de agua
conectados en paralelo tendrán una entrada común que alimentará simultáneamente
a ambos, así como una salida común que drenará a ambos a la vez. Las bombillas
de iluminación de una casa forman un circuito en paralelo, gastando así menos
energía.
3.Sistemas hidraulicos
La hidráulica es la ciencia que forma parte la física y
comprende la transmisión y regulación de fuerzas y movimientos por medio de los
líquidos. Cuando se escuche la palabra “hidráulica” hay que remarcar el
concepto de que es la transformación de la energía, ya sea de mecánica ó
eléctrica en hidráulica para obtener un beneficio en términos de energía
mecánica al finalizar el proceso.
Etimológicamente la
palabra hidráulica se refiere al agua: Hidros - agua. Aulos - flauta. Algunos
especialistas que no emplean el agua como medio transmisor de energía, sino que
el aceite han establecido los siguientes términos para establecer la
distinción: Oleodinámica, Oleohidráulica u Oleólica.
4.Sistemas neumaticos
La neumática es la tecnología que emplea el aire comprimido
como modo de transmisión de la energía necesaria para mover y hacer funcionar
mecanismos. El aire es un material elástico y por tanto, al aplicarle una
fuerza, se comprime, mantiene esta compresión y devolverá la energía acumulada
cuando se le permita expandirse, según la los gases ideales.
E-waste
informcion a contunuacion :
No hay comentarios:
Publicar un comentario